Spatial Intelligence: How AI is Finally Teaching Robots to Understand the Physical World
Artificial intelligence is moving beyond flat screens and text generation to master 3D space, giving robots the physical common sense needed to safely navigate and interact with the real world.
By Factlen Editorial Team
- Applied Robotics Developers
- Focuses on translating multimodal AI models into precise, real-time motor control for industrial and commercial robotics.
- Embodied AI Pioneers
- Argues that true artificial general intelligence requires foundational spatial awareness and the ability to simulate 3D worlds.
- Human-Robot Interaction Researchers
- Emphasizes the need for robots to share human spatial memory and natural language understanding to act as safe, collaborative partners.
What's not represented
- · Labor unions concerned about the displacement of factory and warehouse workers by highly autonomous robots.
- · Privacy advocates questioning the data collection implications of robots continuously mapping and recording 3D environments in homes and hospitals.
Why this matters
For decades, robots have been confined to highly structured factory cages because they lacked the common sense to understand their physical surroundings. Spatial intelligence bridges this gap, enabling safe, autonomous machines that can assist in homes, hospitals, and dynamic workplaces.
Key points
- Spatial intelligence enables AI to perceive, reason, and act within the 3D physical world.
- World models act as internal physics engines, allowing robots to simulate actions before executing them.
- Vision-Language-Action (VLA) models translate natural language commands into precise robotic motor controls.
- World Labs, founded by AI pioneer Fei-Fei Li, raised $1 billion in 2026 to develop Large World Models.
- By the end of 2026, 30% of enterprise AI systems are projected to integrate spatial capabilities.
I used to think robotics was just about control loops and path planning. But consider the "Dog versus Robot" test. If a tennis ball rolls under the living room couch, a dog inherently understands object permanence—it knows the ball is still there, hidden from view, and will actively try to retrieve it. In contrast, a $50,000 robot relying on traditional mapping software will often update its internal voxel grid to "empty" the moment the ball disappears from its camera feed. It stares blankly, having entirely forgotten the object's existence. This fundamental lack of physical common sense has been the invisible wall holding back the robotics industry for decades. Machines have been memorizing coordinates rather than truly understanding the three-dimensional space they inhabit.[7][8]
For the past few years, the artificial intelligence boom has been dominated by Large Language Models (LLMs). These systems are undeniably brilliant at processing text, writing code, and generating poetry. Yet, as AI pioneer Fei-Fei Li describes them, they remain "wordsmiths in the dark: eloquent but inexperienced, knowledgeable but ungrounded." An LLM can write a flawless essay about gravity, but it does not possess the innate, intuitive understanding that a glass pushed off the edge of a table will shatter on the floor. Without this grounding in physical reality, AI systems are confined to the digital realm, unable to safely or reliably manipulate the messy, unpredictable environments of the real world.[1][5]
As we move through 2026, a massive paradigm shift is underway. The industry is pivoting from purely digital intelligence to "Spatial Intelligence" and "Physical AI." This is the era where artificial intelligence steps beyond flat, two-dimensional screens and begins to perceive depth, geometry, and temporal dynamics. Instead of merely recognizing a pattern of pixels as a "chair," a spatially intelligent system understands the chair's exact metric distance, its relationship to the table next to it, and the fact that a human might soon sit in it. This transition from 2D perception to 3D and 4D reasoning is the critical bridge required to bring autonomous, general-purpose robots into our homes and workplaces.[8]
Leading this charge is World Labs, a spatial intelligence company founded by Fei-Fei Li, often referred to as the "godmother of AI" for her foundational work on ImageNet. In 2026, World Labs secured $1 billion in funding to develop Large World Models (LWMs). Li argues that animal intelligence evolved over 500 million years primarily through seeing and moving within the physical world, long before the invention of language. Therefore, true artificial general intelligence requires machines to develop that same foundational spatial awareness. World Labs' initial product, Marble, demonstrates this by generating highly detailed, interactive, and persistent 3D environments from simple text or image prompts, serving as a proving ground for spatial reasoning.[1][5]

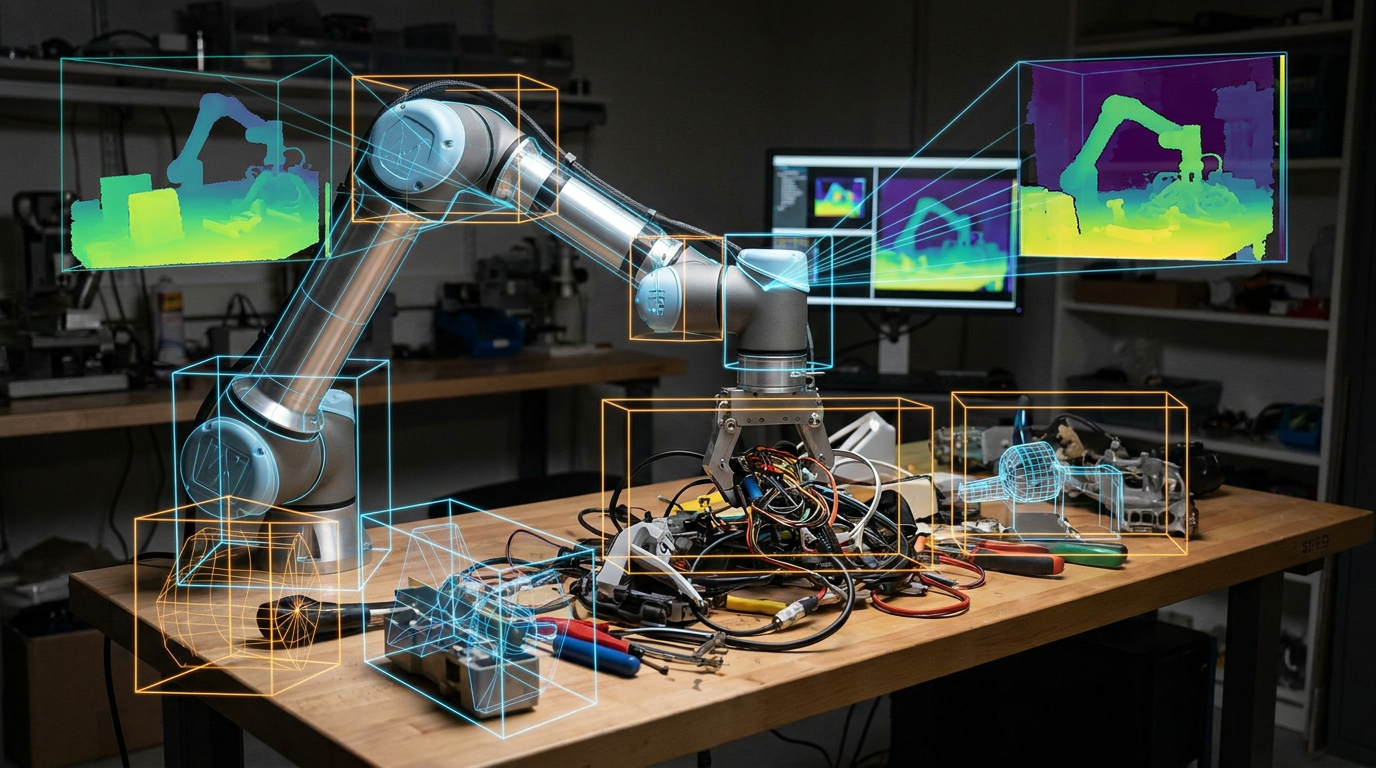
To understand how Physical AI actually works, it helps to break down the "brain" of a modern robot into three distinct layers. The first layer consists of Foundation Vision Models, which act as the robot's visual cortex. Unlike older computer vision systems that simply drew bounding boxes around objects, these massive, pre-trained models extract deep geometric truths from flat images. They perform metric depth estimation to calculate exact physical distances and execute visual relocalization to pinpoint the robot's precise coordinates in a room without relying on GPS. This layer transforms a raw camera feed into a rich, quantifiable 3D map of the immediate surroundings.[7]
The second layer is the World Model, effectively an internal physics engine running inside the robot's mind. Before a robot makes a physical move, the World Model allows it to simulate the future state of its environment. It predicts how objects will react to applied force, understanding concepts like gravity, friction, and occlusion. If a robotic arm needs to pull a book from a tightly packed shelf, the World Model anticipates how the adjacent books might shift or fall. NVIDIA's Cosmos, a family of world foundation models, is specifically designed to provide this kind of physical AI simulation, allowing robots to "imagine" the consequences of their actions before executing them in reality.[1][3]
The final layer is the Vision-Language-Action (VLA) model, which serves as the ultimate bridge between human intent and robotic movement. VLAs take the rich 3D understanding from the vision and world models, combine it with a natural language command from a human, and translate the entire package into executable motor controls. If you tell a robot to "pick up the blue cup next to the laptop," the VLA model grounds the words "blue cup" to the specific 3D coordinates identified by the vision system, and then calculates the exact joint torques and trajectory required for the robotic arm to grasp the object smoothly.[2][7]

The final layer is the Vision-Language-Action (VLA) model, which serves as the ultimate bridge between human intent and robotic movement.
The rapid evolution of VLA models is yielding unprecedented breakthroughs in robotic dexterity. Microsoft Research recently introduced Rho-alpha, a model they classify as "VLA+." Built upon their Phi family of vision-language models, Rho-alpha expands the robot's perceptual modalities beyond just sight and sound by integrating tactile sensing. This means the robot doesn't just look at an object to understand it; it can feel the resistance and texture of the item it is gripping. This multimodal feedback loop allows the robot to adjust its grip strength in real-time, preventing it from crushing a delicate object or dropping a heavy one, a crucial capability for complex bimanual manipulation tasks.[2]
Despite these advancements, a persistent challenge known as the "grounding gap" remains. Many vision-language models still struggle to accurately judge complex 3D spatial relationships, occasionally failing to understand how objects overlap or move relative to one another. To address this, NVIDIA Research developed SpatialClaw, a training-free framework that dramatically improves spatial reasoning. Instead of forcing the AI to guess spatial relationships purely through neural network weights, SpatialClaw treats Python code as the action interface. It allows the AI agent to write and execute code to call precise geometric tools—like depth maps and camera trajectories—achieving nearly 60% accuracy on rigorous spatial reasoning benchmarks.[3][6]
Beyond immediate perception, true spatial intelligence requires a sense of history. Researchers at MIT recently unveiled DAAAM, a spatiotemporal memory framework that allows robots to remember the physical world over time. As the robot navigates a building, DAAAM aggregates visual data and annotates multiple objects in parallel, speeding up computation tenfold. This creates a highly efficient, searchable 3D database of the environment. In practice, this means a factory worker could simply ask a robotic assistant, "Where did I leave my wrench?" and the robot can instantly query its spatial memory to provide the exact location where it last saw the tool hours earlier.[4]
The commercial implications of these spatial breakthroughs are immense. Industry analysts project that by the end of 2026, 30% of enterprise AI systems will have integrated some form of spatial capability. In manufacturing, spatially intelligent robots can navigate dynamic, unstructured factory floors without requiring pre-programmed tracks or extensive safety cages. In retail, spatial AI is being used to optimize store layouts and manage inventory autonomously. And in healthcare, robots equipped with deep spatial awareness can safely assist with patient mobility and logistics in crowded hospital corridors, drastically reducing the risk of collisions and accidents.[8]

However, training these sophisticated physical AI models requires overcoming a massive data bottleneck. Unlike LLMs, which can scrape trillions of words from the internet, there is a severe scarcity of high-quality, diverse data representing physical robotic interactions. To solve this, companies are turning to hyper-realistic simulators. Platforms like NVIDIA Isaac Sim generate physically accurate synthetic datasets, allowing virtual robots to practice millions of grasping and navigation tasks in simulated environments before the software is ever deployed to a physical machine. This "sim-to-real" transfer is the engine accelerating the current robotics renaissance.[2][3]
The transition to spatial intelligence also brings significant computational hurdles. Processing dense 3D point clouds, running real-time physics simulations, and executing complex VLA models requires vastly more compute power than generating text. To achieve the low latency required for a robot to catch a falling object or avoid a moving human, researchers are moving away from computationally heavy Neural Radiance Fields (NeRFs) toward techniques like 3D Gaussian Splatting. These explicit point cloud representations render environments incredibly fast, providing the real-time visual processing speeds necessary for safe, embodied AI operations.[1][8]

Ultimately, the rise of spatial intelligence represents the moment artificial intelligence finally breaks out of the screen. For decades, our interactions with AI have been mediated by keyboards, mice, and flat displays. We have been forcing ourselves to translate our physical needs into the digital language of machines. Physical AI flips this dynamic. By giving machines the ability to perceive, reason, and act in three dimensions, we are teaching them to speak the language of our physical reality, allowing them to seamlessly integrate into the human environment.[5][8]
As these models continue to scale, the dream of the general-purpose robot—a machine that can fold laundry, assemble complex machinery, or assist the elderly with the same intuitive grace as a human—moves from science fiction to engineering reality. Spatial intelligence is not just an incremental software update; it is the foundational scaffolding required to build reliable, active systems that share our physical common sense. By mastering the geometry and physics of the real world, AI is poised to become a truly capable partner in solving some of humanity's most pressing physical challenges.[8]
How we got here
2000s
Classic SLAM (Simultaneous Localization and Mapping) allows robots to map environments using geometric points, but without understanding what objects actually are.
2010s
The introduction of ImageNet and deep learning revolutionizes 2D computer vision, allowing AI to accurately classify objects in flat images.
2023
Large Language Models (LLMs) achieve unprecedented fluency in text generation, but researchers note their lack of grounding in physical reality.
Early 2024
AI pioneer Fei-Fei Li founds World Labs to focus entirely on spatial intelligence and the development of Large World Models.
2026
Major tech firms release advanced VLA+ models and spatiotemporal memory frameworks, bringing robust physical AI to enterprise robotics.
Viewpoints in depth
Embodied AI Pioneers
Argues that true artificial general intelligence requires foundational spatial awareness and the ability to simulate 3D worlds.
This camp, led by visionaries like Fei-Fei Li, believes that the current obsession with Large Language Models is a detour. They argue that because animal intelligence evolved over millions of years through physical movement and visual perception—long before language existed—machines must follow a similar path. By building Large World Models (LWMs) that inherently understand physics, geometry, and temporal dynamics, they aim to create AI that possesses genuine physical common sense rather than just statistical text prediction.
Applied Robotics Developers
Focuses on translating multimodal AI models into precise, real-time motor control for industrial and commercial robotics.
For hardware manufacturers and enterprise automation providers, the theoretical promise of spatial intelligence must translate into reliable joint torques and safe navigation. This perspective is heavily invested in Vision-Language-Action (VLA) models and synthetic data generation. Their primary concern is closing the 'grounding gap'—ensuring that when a robot is told to perform a task, it can accurately map that language to the exact 3D coordinates of its environment and execute the movement without colliding with humans or damaging delicate objects.
Human-Robot Interaction Researchers
Emphasizes the need for robots to share human spatial memory and natural language understanding to act as safe, collaborative partners.
Researchers focused on the human element of robotics argue that spatial intelligence is ultimately about communication. If robots are to leave factory cages and enter homes or hospitals, they must understand space in the same way humans do. This camp prioritizes the development of spatiotemporal memory frameworks, allowing humans to interact with robots using natural, context-heavy language—like asking a machine to fetch an item left in another room hours ago—relying on the robot's persistent internal map of the world.
What we don't know
- How quickly the massive computational costs of running real-time world models can be reduced for consumer-grade hardware.
- Whether synthetic data generated in simulators will be sufficient to cover all unpredictable edge cases in real-world human environments.
- How regulatory bodies will approach safety certifications for robots that dynamically generate their own movement paths using physical AI.
Key terms
- Spatial Intelligence
- The capability of an artificial intelligence system to perceive, reason about, and interact with three-dimensional physical environments.
- World Model
- An AI model that simulates the physics and dynamics of an environment, allowing a system to predict the consequences of its actions before executing them.
- Vision-Language-Action (VLA) Model
- A multimodal AI architecture that bridges natural language instructions and visual perception to generate direct motor control commands for a robot.
- Spatiotemporal Memory
- A framework that allows a robot to remember the locations and states of objects across both 3D space and time, enabling it to recall where items were previously seen.
- Sim-to-Real Transfer
- The process of training an AI model in a highly accurate virtual simulation and then deploying that trained model onto a physical robot in the real world.
Frequently asked
What is Spatial Intelligence in AI?
Spatial intelligence is the ability of an AI system to perceive, understand, and interact with the 3D physical world. It allows machines to comprehend depth, geometry, and how objects relate to one another over time.
How does a World Model differ from a Large Language Model?
While an LLM predicts the next word in a text sequence, a World Model acts as an internal physics engine. It predicts how a physical environment will change when an action is taken, such as knowing a glass will break if pushed off a table.
What is a Vision-Language-Action (VLA) model?
A VLA model is a system that translates human language and visual input into physical robotic movement. It allows a user to give a natural language command, which the robot then grounds in its 3D environment to execute the correct motor actions.
Why is spatial intelligence important for robotics?
Without spatial intelligence, robots merely memorize coordinates and struggle to adapt to minor changes in their environment. Spatial awareness gives them the physical common sense needed to navigate unstructured spaces safely alongside humans.
Sources
Source coverage
8 outlets
3 viewpoints surfaced






[1]World LabsEmbodied AI Pioneers
Spatial Intelligence: Transforming Seeing into Doing
Read on World Labs →[2]Microsoft ResearchApplied Robotics Developers
Rho-alpha: A VLA+ model for physical AI
Read on Microsoft Research →[3]NVIDIA ResearchApplied Robotics Developers
Cosmos: NVIDIA's world foundation model family for physical AI
Read on NVIDIA Research →[4]MIT NewsHuman-Robot Interaction Researchers
A new spatiotemporal memory framework for robots
Read on MIT News →[5]Bloomberg TechnologyEmbodied AI Pioneers
Fei-Fei Li on Spatial Intelligence and Large World Models
Read on Bloomberg Technology →[6]MarkTechPostApplied Robotics Developers
NVIDIA AI Introduces SpatialClaw for Spatial Reasoning
Read on MarkTechPost →[7]Over the Reality AIEmbodied AI Pioneers
The Brains Behind the Bots: A Guide to Physical AI Models
Read on Over the Reality AI →[8]Factlen Editorial TeamHuman-Robot Interaction Researchers
Synthesis by Factlen editorial team
Read on Factlen Editorial Team →



Every angle. Every day.
Get ai stories with full source coverage and perspective breakdowns delivered to your inbox.